History of Mechanical Citrus Harvesting
1990 to 2008
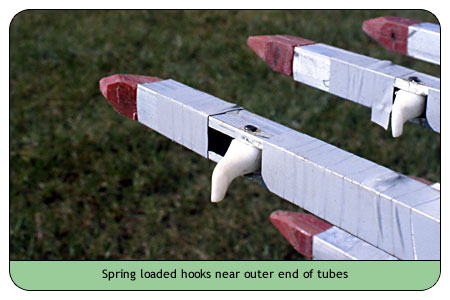
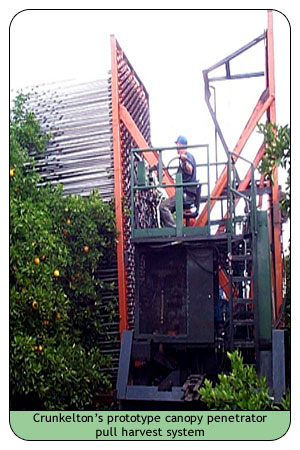
Canopy Penetrator
Crunkelton – The FDOC funded the development of the Crunkelton canopy penetrate pull harvest system. It had a rectangular array of tubes (Crunkelton, W. 1992. Mechanical citrus & other fruit picker. United States Patent No. 5161358) with spring loaded fingers which were inserted into & withdrawn from the tree canopy (See Photo A, Photo B, Video). Within the canopy volume penetrated by the tubes, 67 to 77% & 73 to 91%, respectively, of the oranges were removed after 1 & 2 insertions (3-1). It was felt this concept may provide selective harvesting in Valencia oranges. After the prototype was tested in the 1995-96 season, the FDOC funded the development of a larger production prototype pull & catch unit that could field tested. A fruit picking head ~ 9 feet wide & 17 feet high with ~ 900 tubes 8 feet long & a catchframe (See Photo) were completed in the 1999-2000 season, but no field testing was done. A commercial prototype harvester was designed & constructed during the 2001-02 season, but limited field testing was completed because of operational problems with the machine. The harvesting concept was to automate the insertion & withdrawing of the tubes into the entire height of the tree canopy at 4 foot increments down the tree row. With the 9 foot wide picking head, 1 insertion & withdrawal at 4 foot increments would provide 2 insertions & withdrawals in all canopy volumes. Machine reliability problems prevented the harvester from being fully evaluated in the field & development was discontinued.
Referenced Articles
3-1 Field Test Results with Mechanical Citrus Fruit Removal Devices
Previous Section: Trunk Shake & Trunk Shake Catch Harvest Systems
Next Section: Fruit Pickup Machines

{kind=link}
{kind=link}
{kind=link}