History of Mechanical Citrus Harvesting
1990 to 2008
Continuous Travel Canopy Shake & Continuous Travel Canopy Shake Catch Harvest Systems
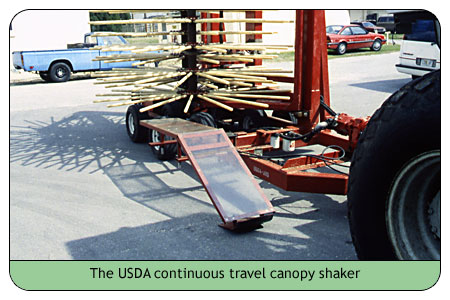
USDA – The FDOC funded the first prototype continuous travel canopy shaker which was fielded tested in the 1995-96 season. It was designed & developed by Dr. Don Peterson (USDA, Kearneysville, WV) utilizing 2 oscillating spoked drums which removed 70 to 90% of the oranges in the portion of the canopy penetrated by the spokes (See Photo, Video). For the 1996-97 season, the USDA redesigned shaker removed 55% of the oranges in larger diameter tree canopies to 95% in smaller tree canopies with machine capacities up to 25 t/h. (6-1) (6-2) (US Patent No. 4860529).
Korvan – The USDA continuous travel canopy shaker was licensed to Korvan Corporation, Linville, WA. For the 1999-2000 season, they built a self-propelled double drum (each drum 12 foot diameter & 12 feet high) shaker with catchframe & opposite tree row side self propelled catchframe. Because the double drum design made the shake catch machine quite long & difficult to maneuver at row ends, Korvan changed their design to 2 self-propelled units with a single drum shaker with catchframe in the 2001-02 season. The single drum (13 feet diameter, 12 feet high) was moved in a circular pattern while moving through the tree canopy & was balanced with counter weights (See Photo, Video). One harvest system was sold in Florida but it was not reliable & Korvan discontinued development on the harvester in the 2003-04 season.
Oxbo - During the 1997-98 season, America Machinery Inc. (AMI, Avon Park, FL) operated the USDA redesigned double drum shaker & proposed a single drum design shaker for a more compact & reliable machine. For the 1998-99 season, with FDOC funding, Oxbo International Corporation (Byron, NY) built & field tested 2 pull behind single 12 foot diameter drum shakers. For dynamic balance, alternate sets of spokes in the drum moved horizontally in opposite directions. Oxbo followed in the 1999-2000 with a pair (mirror image) of self-propelled single drum shakers with catchframes (See Photo, Video). Each mirror image machine operated on opposite sides of the tree row. The harvested fruit was conveyed into an oversized goat truck, & normally 2 trucks were required to haul fruit from each machine, requiring a total of 6 operators/drivers for the harvest system. Subsequently, 3 Oxbo harvest systems were in operation during the 2001-02 season. They also built a pull behind continuous travel canopy shaker without catchframe for groves not suitable for catchframes (See Photo, Video). The persons/companies working with mechanical harvesting systems have favored the Oxbo design & they have continued to improve the design & funtionality of this harvest system. During the 2006-07 season, 15 Oxbo self-propelled systems with catchframes & 2 pull behind without catchframes were in operation. These systems harvested a total of 35,000 acres & 8 million boxes of oranges.
Referenced Articles
6-1 Field Test Results with Mechanical Harvesting Equipment in Florida Oranges
6-2 Peterson, D. L. 1998. Mechanical harvester for processed oranges. Applied Eng. In Agric. 14(5): 455-458
Previous Section: Canopy Area Shake Catch Harvest Systems
Next Section: Robotics

{kind=link}
{kind=link}
{kind=link}
{kind=link}