History of Mechanical Harvesting in Florida Citrus
By Jodie D. Whitney
July 2006
Additional information Video Index
1950s-1980s
Collective concern by the Florida citrus industry about the availability of
labor in 1957 to harvest steadily increasing production/acreage
[Additional information: Text -
01
],
pushed for the establishment of a citrus harvesting research project at
the University of Florida Lake Alfred CREC (then known as the Citrus Experiment
Station). Seasonal labor requirements were usually over 20,000 people and
peaked at 35,000 in 1980 when citrus production was 284 M boxes (13 Mt).
Harvesting then, as is now, was affected by fruit type, utilization (fresh vs.
processed), grove characteristics, and the cost and availability of harvest
labor. Prior to the severe freezes of the 1980s, well over 50% of the citrus
was produced on trees 20 to 30 ft tall on the deep sand or ridge area of
Central and North Florida. Most of the mechanical harvesting research was
conducted in this area.
Citrus harvesting involves two operations – 1) picking or removing fruit from
the tree and placing it in a field container and 2) handling the field
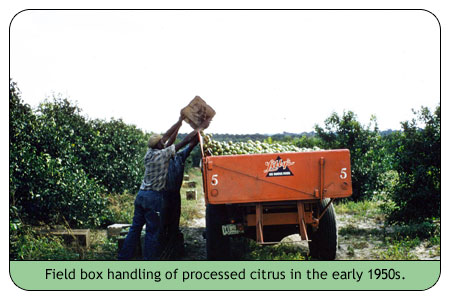
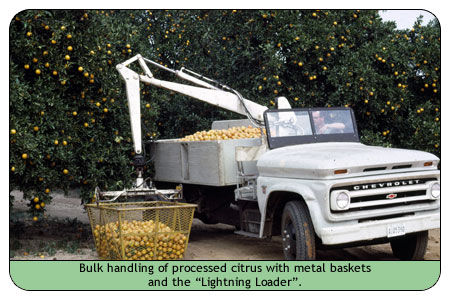
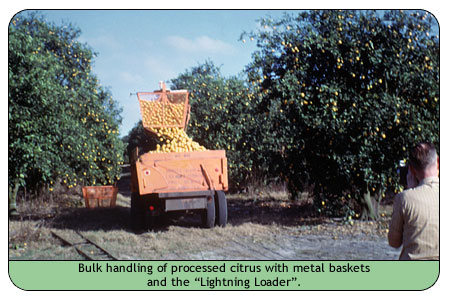
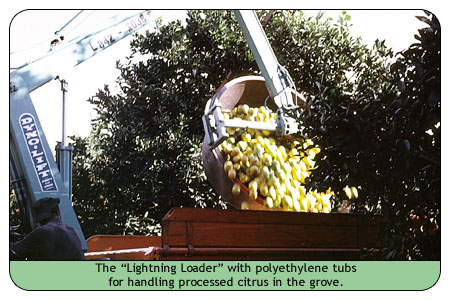
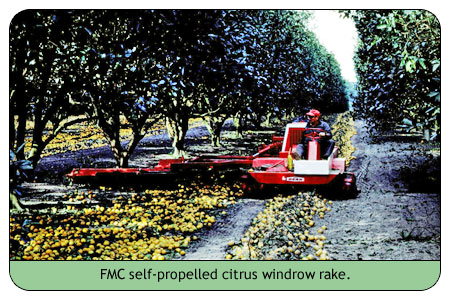
containers in the grove and hauling the fruit out of the grove. In the 1950s,
the handling and hauling operation was mechanized , reducing handling and
hauling labor by at least two thirds.
[Additional information: Text -
01,
02
Images -
01,
02,
03,
04
Videos -
01,
02,
03,
04
]
After initial efforts to improve the productivity of manual harvesters, perfecting a “mechanical picker” was the focus of many projects during the 1950s, 60s, and 70s. Much of the significant work was done by a number of researchers at the University of Florida CREC at Lake Alfred. Except for one, Bill Wilson, a Horticulturist, all were Agricultural Engineers. They and their main areas of research were:
- Glenn Coppock, FDOC, who initiated the project, picking aids, contact devices, limb shaker-catchframes, and air shakers;
- Pierre Jutras, UF, air shakers and limb shakers;
- Scott Hedden, USDA Project Leader, picking platforms, limb shaker-catchframes, fruit pickup machines;
- Don Lenker, USDA, limb shaker design, contact devices;
- Dale Marshall, USDA, fruit pickup machines;
- Harold Sumner, USDA, foliage and limb shakers, fruit windrow rakes and pickup machines;
- Don Churchill, USDA, fruit pickup machines;
- Jim Donhaiser, FDOC, air shakers;
- Jodie Whitney, UF, air and trunk shakers, fruit pickup machines.
- Bill Wilson, FDOC, worked on screening and testing abscission chemicals.
Much of the work by the researchers was done in cooperation with machinery manufacturers, inventors, and chemical companies.
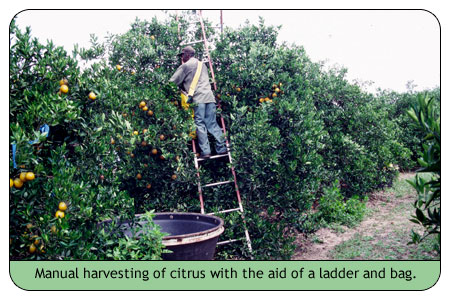
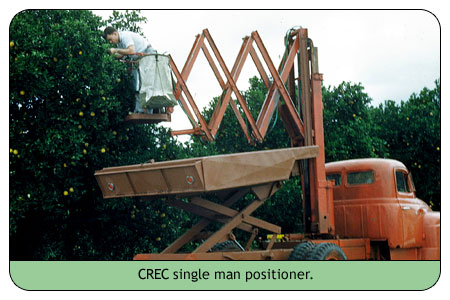
Initially, time and motion studies were conducted on conventional manual
harvesters to determine ways to improve their productivity by replacing ladders
with mobile platforms.
[Additional information: Text -
01
Images -
01,
02
Video -
01,
02
]
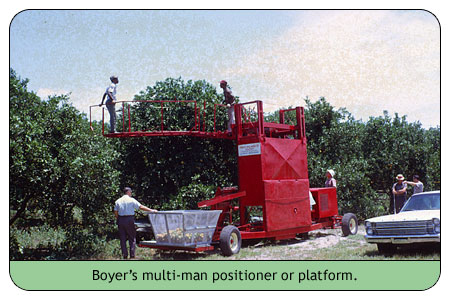
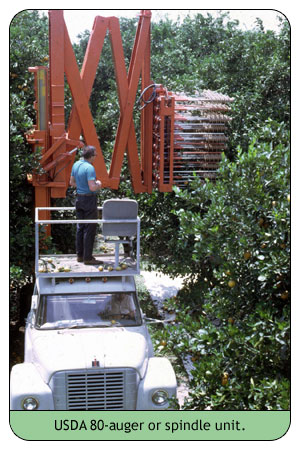
Maximum productivity gains with mobile platforms were 30 to 40%, but the
investment in platforms, picking aids, man positioners, etc. was never
proven to be economically feasible.
[Additional information: Text -
01
Images -
01,
02,
03
Video -
01,
02,
03,
04
]
Beginning in the early 1960s, mechanical methods in the form of contact devices (those which contact the fruit to separate it from the tree) were investigated. Many of the contact devices were designed to duplicate the fruit separation techniques of manual harvesters and be suitable for fresh or processed citrus harvesting [Additional information: Text - 01, 02, 03 Images - 01, 02, 03, 04 Video - 01, 02, 03 ] , but they showed little potential for acceptance. The performance of contact devices was usually limited to less than 70% fruit removal because large tree canopies and limb structures limited canopy penetration.
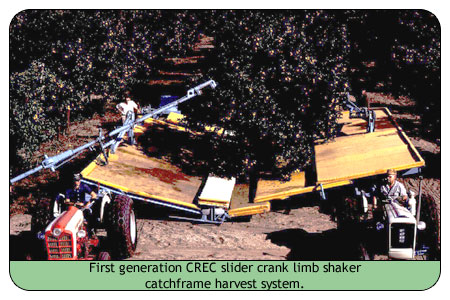
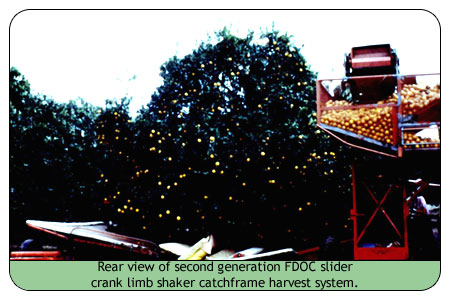
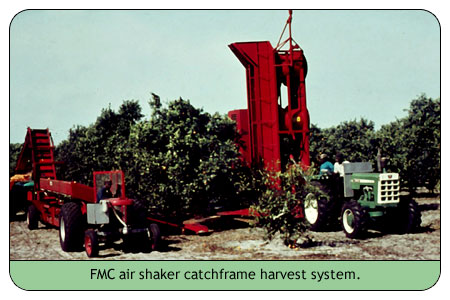
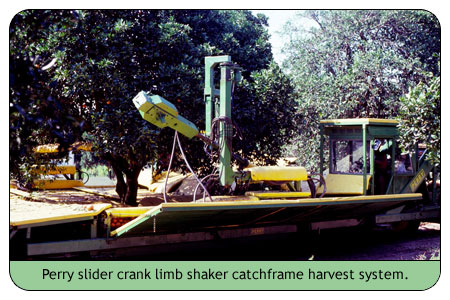
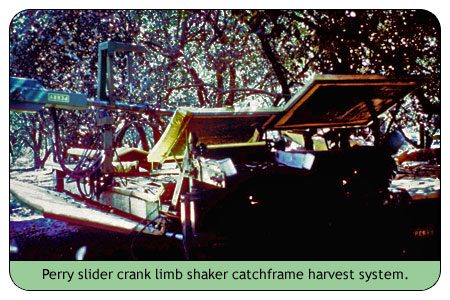
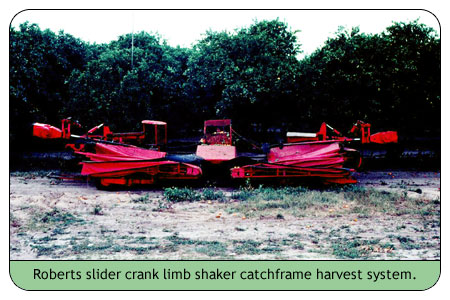
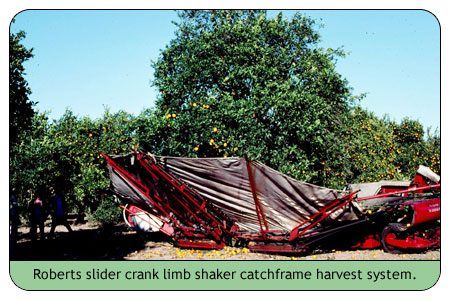
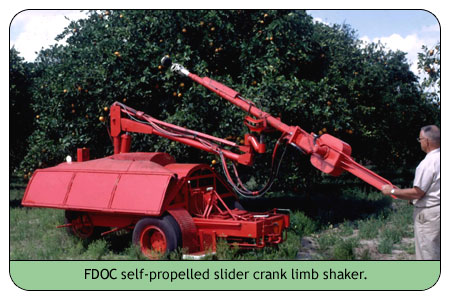
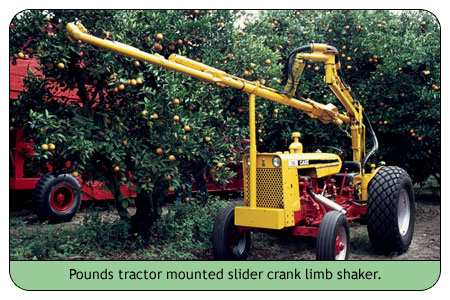
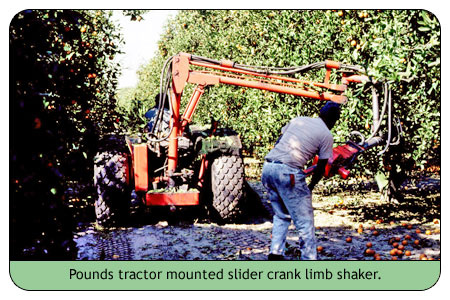
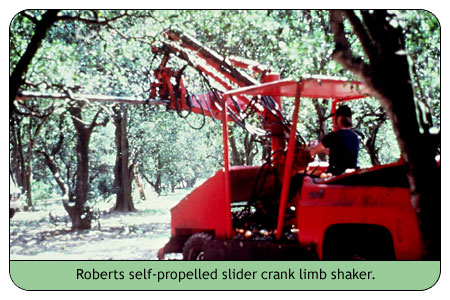
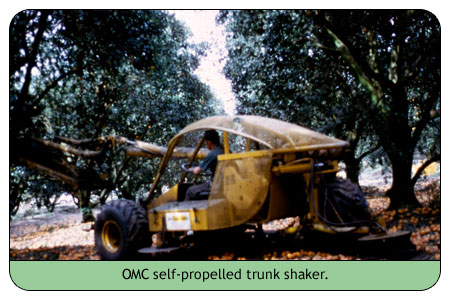
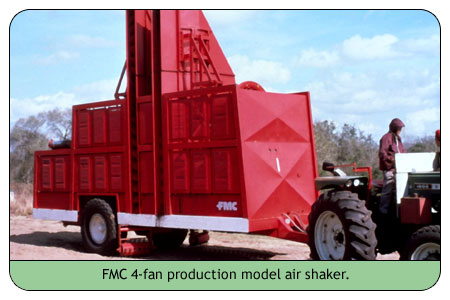
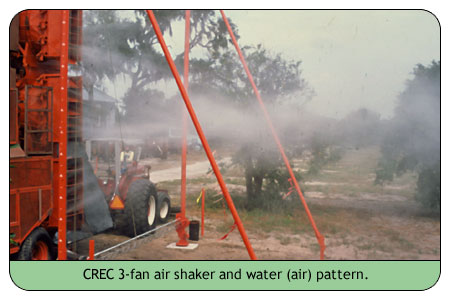
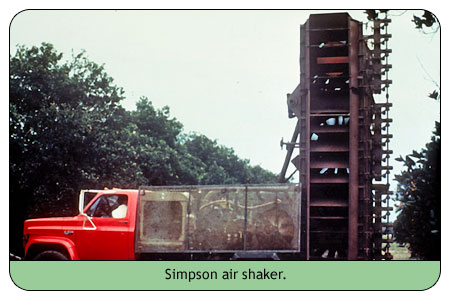
In the early 1960s, investigations began on mass removal (shaker) harvest systems which appeared to have potential to harvest citrus acceptable for processing at a rate commensurate with cost. [Additional information: Text - 01 ] Research was directed mainly toward harvesting processed oranges which required the bulk of the harvesting labor. Development of limb, air, trunk, and foliage (canopy) shakers, with and without catchframes, began without the fruit loosening aid of abscission chemicals. [Additional information: Text - 01, 02, 03, 04, 05, 06, 07, 08, 09, 10, 11, 12, 13 Images - 01, 02, 03, 04, 05, 06, 07, 08, 09, 10 Video - 01, 02, 03, 04, 05, 06, 07, 08, 09, 10 ] Orange removals ranged up to 90% and were generally higher with limb shakers. Yield effects on early and midseason oranges were minimal, but yield reductions on Valencia oranges (constituted about ½ Florida’s orange production and mature fruit is harvested when young fruit or next year’s crop is on the tree), shaken late in the harvest season were up to 40%.
This combination of fruit removals and particularly large yield reductions resulted in low harvesting efficiencies. [Additional information: Text - 01 ] Harvesting efficiency was defined as the percentage of crop that could be recovered mechanically compared to manual harvesting. Thus, if a mechanical harvester removed 90% of the crop and reduced subsequent yields by 10%, the harvesting efficiency would be 0.9 x 0.9 = 0.81 or 81%.
Development work on limb shakers for Valencia orange harvesting demonstrated that long-stroke (6 to 8 in), low frequency (4 to 5 Hz) shaking maximized mature fruit removal and minimized subsequent yield reductions. [Additional information: Text - 01 ] Vertical foliage shakers were developed because it was felt that, technically, they could achieve high mature Valencia fruit removals with insignificant young fruit damage (removal) by controlled shaking in the main fruit bearing zone of the tree. Field trials over the Valencia harvest season demonstrated mature fruit removals of 80 to 90% with subsequent yield reductions of 15 to 20% or an average harvesting efficiency of 75%. [Additional information: Text - 01 Images - 01, 02 Video - 01 ] Further research on biophysical properties of citrus related to mechanical harvesting provided a better understanding of why higher shaker fruit removals were difficult to achieve and why Valencia orange yield reductions associated with shakers were more pronounced later in the Valencia harvest season. [Additional information: Text - 01, 02 ]
It was recognized that some mature fruit loosening would be beneficial to shakers in the fruit removal process and abscission chemical development was initiated. [Additional information: Text - 01 ] Several abscission chemicals were developed for field testing. [Additional information: Text - 01, 02 ] In 1973, Acti-Aid (cycloheximide) was cleared for use on processed oranges by the EPA (Environmental Protection Agency), but could only be used on early and midseason oranges because it was phytotoxic to young Valencia fruit and flush. Another abscission chemical, CMNP (5-chloro-3-methyl-4-nitro-1H-pyrazole), known by its trade name of Release, was given an EUP (Experimental Use Permit) by the EPA and could be used on all processed oranges. In a Valencia field trial with limb shakers, harvesting efficiencies were ~ 66% without Release and 80 to 85% with Release. [Additional information: Text - 01, 02, 03 ]
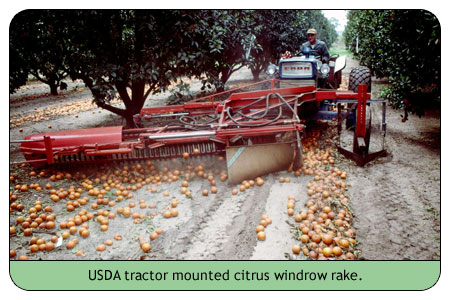
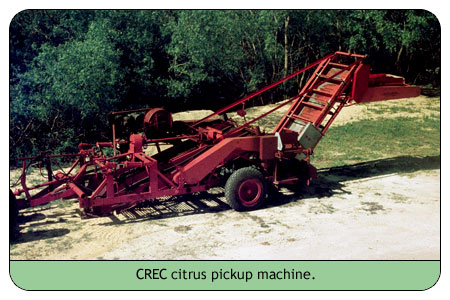
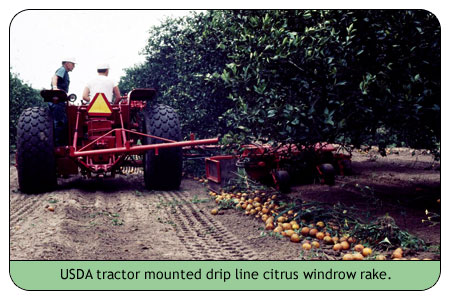
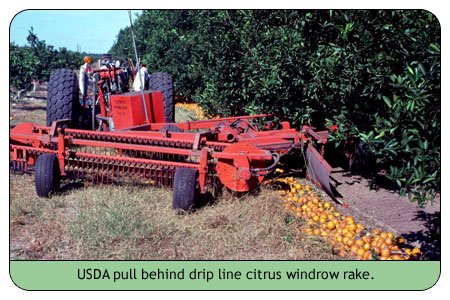
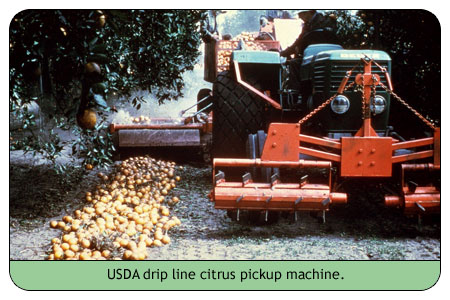
Because fruit loosening by the abscission chemicals usually resulted in considerable preharvest fruit drop 3 to 6 days post spray, machines were developed to pickup fruit from the ground. [Additional information: Text - 01 ] In the 1970s, most of the mechanical harvesting systems utilized abscission chemicals with limb, air, or trunk shakers to remove oranges to the ground. Pickup machines were designed to pickup fruit off the ground. [Additional information: Text - 01 Images - 01, 02, 03, 04, 05, 06, 07, 08, 09, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20 Video - 01, 02, 03, 04, 05, 06, 07, 08, 09, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24 ] Limb shaker-catchframe systems were used on old, tall, highly skirted seedling trees where visibility was good for the machine operators. The catchframe also minimized fruit damage to oranges falling from trees 20 to 30 ft tall. [Additional information: Text - 01 ]
In 1974-75, the volume of mechanically harvested oranges (mostly early and midseason) peaked at 220,000 boxes (~10,000 t).
Numerous problems were encountered with these systems. Cool weather (less than 70 deg F) and/or rain within 2 hours after application usually rendered chemicals ineffective. Because of nonuniform and inconsistent fruit loosening by the abscission chemicals (Acti-Aid and Release), and losses in fruit collection, harvesting efficiencies were frequently less than 95%. Chemical plus application costs were significant and ranged from $0.10 to $0.25 per90 lb box. High rates of Acti-Aid caused excessive defoliation, and oranges sprayed with either chemical had to be processed in 7 to 10 days post application to prevent spoilage. Tree damage concerns of the grower from the chemical and/or shaker were defoliation, small and large limb breakage, and bark damage. [Additional information: Text - 01 ] Harvesting system productivities were usually low. Under optimum conditions, 1 operator on the mechanical harvesting system could harvest the equivalent of 5 manual harvesters. None of the mechanical harvesting systems proved to be economically feasible.
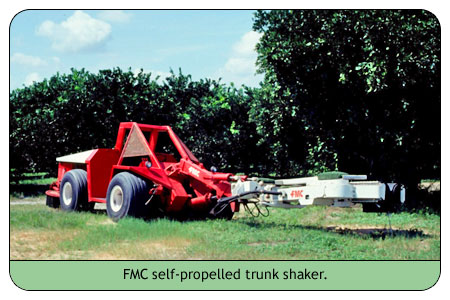
In the late 1970s, a conical scan air shaker was developed [Additional information: Text - 01 Images - 01 Video - 01, 02 ] which proved to be quite effective in removing oranges after having been adequately loosened with abscission chemicals. In the early 1980s, two 5-year field studies were conducted with abscission chemicals, air shakers, and trunk shakers. In the first study [Additional information: Text - 01 ] , harvesting efficiencies of the air shakers averaged 77% while efficiencies of a commercial trunk shaker [Additional information: Images - 01 ] were 93% in Hamlin oranges and 81% in Valencia oranges. In the second study [Additional information: Text - 01 ] using abscission chemicals with a low frequency (5 Hz) linear trunk shaker [Additional information: Images - 01, 02 ] , harvesting efficiencies were near 100% in Hamlin oranges and 91% in Valencia oranges harvested prior to a young fruit diameter of 0.5 in.
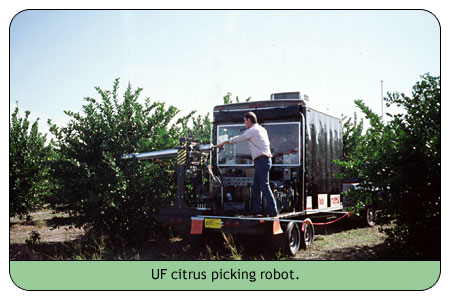
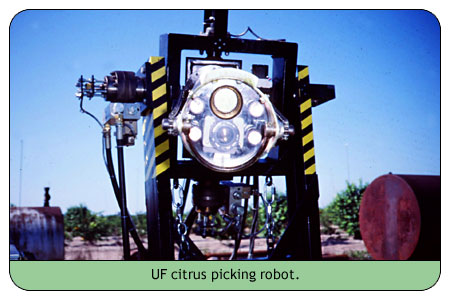
Robotic harvesting research in the 1980s [Additional information: Text - 01, 02, 03 ] developed a single picking arm system with machine vision that could pick 1 orange every 3 to 4 seconds. [Additional information: Images - 01, 02 Video - 01 ] If perfected, this approach could harvest fresh or processed fruit and selectively harvest mature Valencia oranges. The main problems with robotic harvesting were that only about 75% of the oranges in the tree could be properly identified and not all the identified oranges can be picked because of tree structural hindrances. [Additional information: Text - 01, 02 ]
In the late 1970s, national federal policy did not support the development of “labor-saving” technology in agriculture. Consequently, USDA funding into citrus mechanical harvesting was dramatically curtailed. Severe freezes of the 1980s significantly reduced Florida citrus production and bearing acreage. The demand or interest in mechanical harvesting research and development waned and R and D projects into mechanical harvesting were phased out by the mid 1980s.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}